Que tal montar o seu próprio equalizador de áudio para grave e agudo?
Este post apresenta um circuito analógico com 2 filtros ativos de segunda ordem para filtrar frequências baixas e altas de um sinal. O circuito foi desenvolvido e simulado com o software EWB 5.0 Eletronics Workbench.
A Figura 1 mostra o diagrama do circuito. Ele possui um circuito integrado (CI) LM324, um Amplificador Operacional Quádruplo, ou seja, 4 Amp Ops (AO) em um único chip. Os AO são alimentados neste circuito com uma fonte de tensão simétrica, ou seja, com 2 alimentações: +12 Vcc e -12Vcc.
O primeiro AO está montado com a configuração de buffer para fornecer uma alta impedância de entrada para o sinal.
O segundo AO constitui um filtro passa baixa (LPF) ativo de segunda ordem. Esta etapa é responsável pelo ajuste dos tons agudos do nosso equalizador de áudio a partir de um potenciômetro duplo de 50 kohms.
O terceiro AO está configurado como um filtro passa alta (HPF) ativo de segunda ordem. Ele faz o ajuste dos tons graves do equalizador, também utiliza um potenciômetro duplo de 50 kohms.
Figura 1 - Diagrama do circuito do filtro de segunda ordem.
Filtro é um circuito eletrônico utilizado para filtrar um sinal elétrico retirando as faixas de frequências indesejadas. São utilizados por exemplo, para limpar um sinal amostrado retirando os ruídos elétricos presentes. Em áudio os filtros são amplamente utilizados para os controles de grave e agudo.
Os filtros ainda podem ser do tipo analógico, com componentes discretos, ou digitais, implementados por algoritmos executados tipicamente por DSPs (Processador Digital de Sinais)
O termo "ativo" refere-se ao fato das etapas do filtro possuírem componentes ativos (o AO neste caso) e não apenas as etapas dos circuitos RC, com capacitor e resistor. Com o AO é possível configurar um "ganho" para o sinal de entrada ao passar pela etapa de filtragem. Os filtros "passivos" são construídos apenas com pares de resistores e capacitores (circuito RC).
A frequência de corte do filtro é definida pela equação: fc = 1 / (2pi * R*C).
Diz-se "segunda ordem", pois para cada AO temos 2 etapas com circuitos RC, isto permite uma melhor filtragem da frequência do sinal de entrada, isto quer dizer que o sinal indesejado (o que se quer filtrar/anular/cancelar/retirar) terá uma melhor atenuação. A diminuição da intensidade do sinal após passar pela frequência de corte do filtro será mais acentuada/brusca quanto maior for a ordem do filtro. Um filtro de segunda ordem é melhor do que um filtro de primeira ordem.
Dois instrumentos de medição podem ser vistos no diagrama da Figura 1, na parte superior. O da direita é um osciloscópio, utilizado para visualizar a amplitude do sinal de entrada (linha azul) e saída (linha vermelha) de áudio no domínio do tempo. O da esquerda é um Bode Plotter, usado aqui para avaliar o funcionamento do filtro. Com ele é possível visualizar a amplitude do sinal variando em função da frequência.
A Figura 2 mostra o conjunto de geradores de ondas senoidais de diferentes frequências utilizados para a simulação/testes do circuito do equalizador de grave e agudo:
- 10 mV/100 Hz;
- 10 mV/1 kHz;
- 10 mV/5 kHz;
- 10 mV/10 kHz;
- 10 mV/20 kHz.
Para o caso de áudio (música) a frequência audível pelo ouvido humano está compreendida entre 20 Hz e 20 kHz.
Figura 2 - Geradores de sinais utilizados para a simulação.
As Figuras a seguir apresentam os resultados dos testes da simulação do circuito do filtro alterando a posição do cursor dos potenciômetros dos equalizadores de grave e agudo.
Figura 3 - Resposta de frequência: 2 pot em 100 %.
A Figura 3 mostra a curva da resposta de frequência do filtro para os 2 potenciômetros na posição de 100 %. A banda varia de 43 Hz a 38 kHz e abrange a faixa completa do filtro.
Figura 4 - Resposta de frequência: grave em 50 %.
Na Figura 4 reduzimos o ajuste do potenciômetro de grave (filtro passa alta) para 50 %, a frequência de corte inferior do filtro passa então de 43 Hz para 71 Hz.
Figura 5 - Resposta de frequência: grave em 0 %.
Reduzindo o potenciômetro de grave (filtro passa alta) para o mínimo (0 %). Agora a frequência de corte inferior do filtro sobe para 933 Hz, conforme a Figura 5.
Figura 6 - Resposta de frequência: agudo em 50 %.
Na Figura 6 reduzimos o ajuste do potenciômetro de agudo (filtro passa baixa) para 50 %, a frequência de corte superior do filtro passa de 38 kHz Hz para 5 kHz.
Figura 7 - Resposta de frequência: agudo em 0 %.
Reduzindo o potenciômetro de agudo (filtro passa baixa) para o mínimo (0 %). Agora a frequência de corte superior do filtro cai para 2,3 kHz, conforme a Figura 7.
Figura 8 - Resposta de frequência: 2 pot em 0 %.
Por fim, deixamos os 2 potenciômetros do nosso filtro, passa alta e passa baixa, ajustes de grave e agudo respectivamente, no mínimo, posição de 0 %. Temos a menor banda de frequência passante no filtro: 760 Hz a 2,6 kHz. A Figura 8 mostra a resposta de frequência do filtro nesta condição.
Os valores de R e C do filtro passa alta ou passa baixa podem ser alterados conforme desejar, para atender a faixa de frequência que se deseja filtrar.
Este circuito atende muito bem a faixa de áudio, para se trabalhar com som e música como um equalizador de grave, agudo ou passa faixa. Também pode ser utilizado para filtrar (limpar) os sinais ruidosos de sensores.
Este post demonstra a construção de um Monitor de Umidade e Temperatura com um dsPIC30F4013.
O circuito
As principais características do circuito são:
- utiliza o dsPIC30F4013, um Controlador Digital de Sinal - DSC da Microchip. Opera @30 MIPS;
- sensor de temperatura LM35 da National Semiconductor;
- sensor de umidade capacitivo HCH-1000 da Honeywell;
- conversor capacitância/frequência com NE555 da Texas Instruments;
- conversor serial TTL/RS232 com MAX232;
- interface gráfica com display GLCD 128x64 padrão KS0108B e 3 teclas;
- leitura da temperatura pelo ADC-12-bit;
- leitura da capacitância/frequência através do Input Capture;
- envia dados para o PC pela UART;
- calibração via software pelo display;
- salva parâmetros na EEPROM interna;
- criado programa do PC no Visual Basic 6.0;
- firmware do dsPIC desenvolvido no MPLAB IDE com o MPLAB C30.
A Figura abaixo mostra o diagrama em blocos do circuito e os diversos dispositivos conectados ao dsPIC.
Diagrama em blocos do Circuito
Para o controle foi utilizado o dsPIC30F4013, um Controlador Digital de Sinal - DSC da Microchip.
O oscilador interno está configurado com PLL x16 para operar com 30 MIPS, ou 117,92 MHz, frequência necessária para o Input Capture ler o sensor de umidade.
DSC dsPIC30F4013
A Medição da Umidade
O sensor de umidade utilizado é um HCH-1000-001, da Honeywell, do tipo capacitivo.
Sensor de umidade HCH-1000
As especificações deste sensor são mostradas na tabela a seguir, disponível no data sheet do HCH-1000.
Especificação do sensor de umidade. Fonte data sheet HCH-1000 Honeywell.
O gráfico Capacitância x Umidade mostra a resposta do sensor de umidade que possui a sensibilidade típica de 0,6 pF/%RH.
Resposta do sensor de umidade. Fonte data sheet HCH-1000 Honeywell.
A Figura abaixo mostra o sensor de umidade capacitivo HCH-1000-001 montado na matriz de contatos (protoboard).
Sensor de umidade e CI 555 montado no protoboard.
O ADC do dsPIC não consegue ler diretamente a grandeza "capacitância". Um ADC lê tensão.
A Honeywell apresenta em seu artigo "HCH-1000 Series Humidity Sensor Calibration and Output Circuit Data" um conversor de capacitância para frequência utilizando o temporizador de precisão 555.
O CI 555é muito utilizado em eletrônica. Abaixo é apresentado a pinagem e o circuito equivalente.
Circuito equivalente do CI NE555. Fonte data sheet Texas Instruments.
O data sheet do NE555 da Texas Instrument mostra a ligação deste CI para funcionar como um oscilador astável,
Oscilador astável com NE555. Fonte data sheet Texas Instruments.
O data sheet ainda forneceas fórmulas para os cálculos de período e frequência de acordo com os componentes externos utilizados: R1, R2 e C.
Fórmulas para frequência de saída do oscilador astável com 555. Fonte data sheet Texas Instruments.
A Honeywell mostra em seu artigo "HCH-1000 Series Humidity Sensor Calibration and Output Circuit Data" a sugestão para a montagem do sensor de umidade capacitivo HCH-100 com o temporizador 555.
Circuito de aplicação do HCH-1000 com 555. Fonte: Honeywell.
A fórmula para determinar a frequência de saída é apresentada a seguir.
Fórmulas para determinar frequência de saída do HCH-1000 com 555. Fonte: Honeywell.
Com a conversão de capacitância em frequência se torna possível fazer a medição do sinal da capacitância do sensor com o dsPIC. Para esta tarefa é utilizado o módulo Input Capture (IC1) do DSC.
A Medição da Temperatura
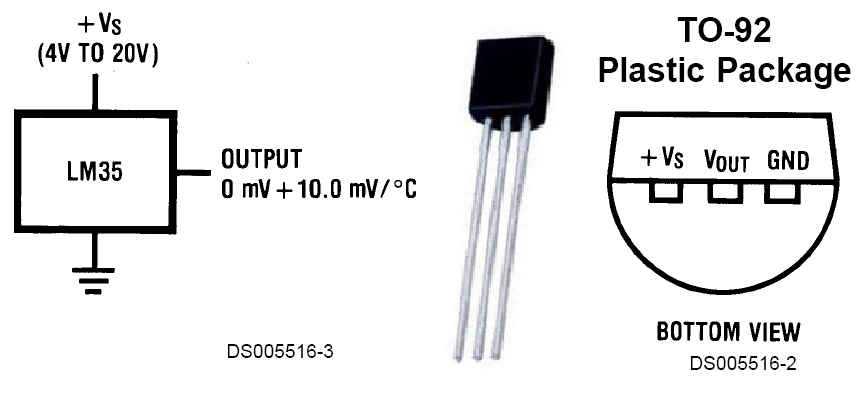
Para a medição de temperatura foi utilizado o CI LM35, um sensor de temperatura de precisão calibrado diretamente para graus Celsius ºC (Centígrado).
Possui saída analógica linear com fator de escala +10 mV/ºC.
Sensor de temperatura LM35. Fonte: data sheet National Semiconductor.
O dsPIC lê diretamente o sinal do sensor pelo conversor analógico-digital ADC interno de 12-bit.
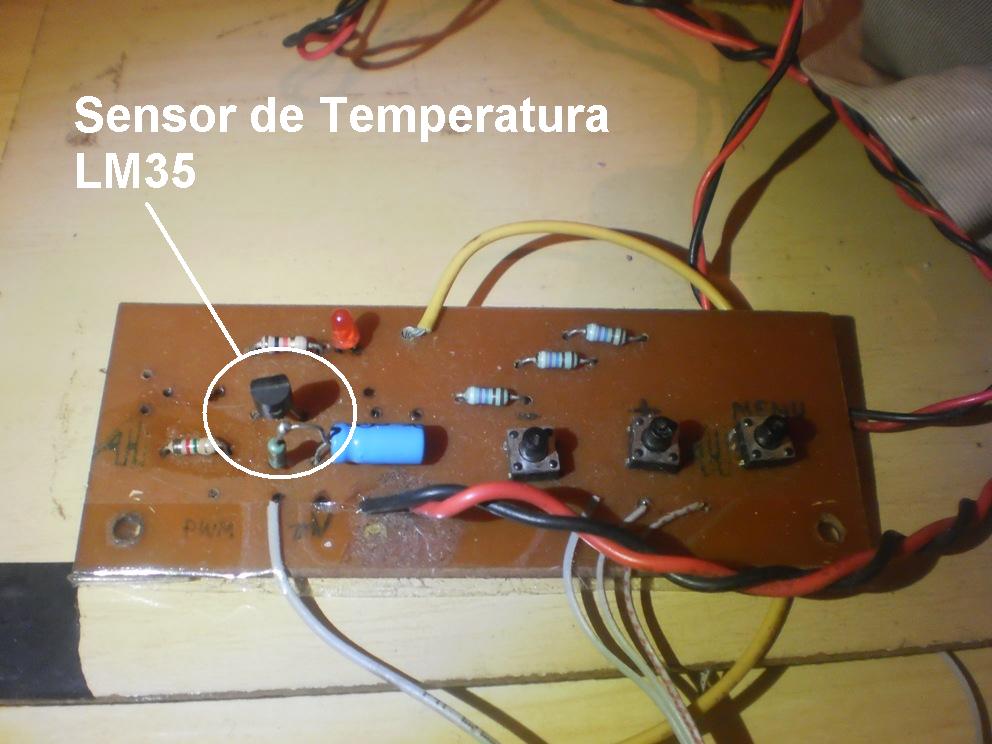
A figura abaixo mostra o sensor montado na placa juntamente com as teclas para navegação no display.
Sensor de temperatura LM35 montado na placa.
A Interface Serial com o Computador
Os dados medidos e calculados pelo dsPIC, temperatura, umidade e capacitância, são enviados para o computador através do módulo de comunicação UART do DSC.
O CI MAX232 foi utilizado como interface entre o dsPIC e o PC, trata-se de um conversor de níveis TTL/RS232.
Placa de interface serial com MAX232.
O circuito completo do protótipo do Monitor de Umidade e Temperatura é mostrado a seguir.
O circuito completo do dsPIC Temperature and Humidity Monitor.
A Interface Gráfica
Como interface gráfica foi utilizado um display GLCD 128x64 padrão KS0108B.
Na tela de medição são mostrados os valores atuais de temperatura [ºC] e umidade relativa do ar [%RH].
Na tela de Monitoramento são mostrados:
- a temperatura. O dsPIC lê a tensão do sensor LM35 pelo ADC e calcula a temperatura pelo fator de escala 10mV/ºC.
- o conteúdo do registro Timer3, utilizado pelo módulo Input Capture IC1.
- o período em us calculado pelo dsPIC através do valor de Timer3. Representa o período do sinal capturado do CI 555, conversor capacitância/frequência.
- a capacitância em pF calculada pelo dsPIC através do sinal do período da frequência capturada pelo IC1. A fórmula utilizada é a do oscilador astável 555, mostrada anteriormente.
- a umidade relativa do ar em %RH calculada pelo dsPIC através do sinal de capacitância encontrado.
A tela de Calibração serve para a calibração da medição de umidade por software.
Os seguintes parâmetros estão disponíveis:
- valores de R1 e R2 em [kohm], os 2 resistores do circuito oscilador astável com o 555, para que o dsPIC calcule a capacitância do sensor de umidade.
- valor de Cp, que corresponde aos valores da capacitância parasita em paralelo com o sensor de umidade (capacitância do protoboard) + capacitância de offset para correção do desvio da capacitância típica do sensor, indicada no datasheet do sensor HCH-1000.
Comparando a Medição
Como saber se a medição da umidade relativa do ar está correta?
O primeiro método foi comparar o valor medido do dsPIC com a previsão meteorológica de 2 sites: o accuweather.com e o climatempo.com.br.
Veja a seguir o histórico da temperatura ambiente, umidade relativa do ar e ponto de orvalho.
Previsão do tempo. Fonte: accuweather.com.
Previsão do tempo. Fonte: accuweather.com.
Previsão do tempo. Fonte: climatempo.com.br.
O segundo método foi executar um teste simples e rápido para determinar a umidade relativa do ar através da medição da temperatura ambiente e a temperatura no ponto de orvalho.
Este método é descrito pelo Prof. Fernando Lang da Silveira na matéria "Umidade relativa: o que é e como se determina?" disponível no site da UFRGS/ Centro de Referência para o Ensino de Física - CREF/ Instituto de Física- iF. Clique aqui para ver esta matéria na íntegra.
O primeiro passo é a medição da temperatura ambiente.
Medição da temperatura ambiente.
O segundo passo é a medição da temperatura da água no ponto de orvalho.
Utiliza-se uma caneca de alumínio com água natural.
Adiciona-se gelo gradativamente à água até que a caneca "perca o brilho" da parte externa de metal e comece a ficar "opaca". Isto indica que se a temperatura da caneca está na temperatura do ponto de orvalho e pequenas gotículas de água começam a se formar na parede externa da caneca.
Anota-se a temperatura da água para o ponto de orvalho.
Determinando a temperatura da água no ponto de orvalho.
Detalhe da marca feita na caneca para identificar o ponto de orvalho.
Detalhe ponto de orvalho atingido.
Detalhe na caneca, marca "x", perca do brilho na parede externa da caneca mostra que se atingiu o ponto de orvalho.
Detalhe ponto de orvalho atingido.
Foi consultada uma tabela de termoresistência para determinar a temperatura através do valor de resistência medida do sensor do tipo PT100.
Tabela de variação da resistência com a temperatura para bulbo de resistência (PT100). Fonte: ECIL.
Da tabela de termoresistência foram extraídos os valores das temperaturas em grau Celsius e convertidas para Kenvin.
Dados do teste para determinar umidade relativa de acordo com a temperatura ambiente e o ponto de orvalho.
O Prof.Lang define a seguinte equação em sua matéria, para determinar a umidade relativa do ar de acordo com a temperatura da água natual (temperatura ambiente) e a temperatura da água no ponto de orvalho (temperaturas em Kelvin):
Equação para determinar a Umidade Relativa do ar. Fonte: Prof. Lang.
Jogando os valores encontrados no teste na fórmula é encontrado o valor de 0,7569 ou 75,69 %RH.
Conclui-se com este teste prático que os valores medidos pelo dsPIC, 24,95 °C e 74,97 %RH, estão coerentes com a temperatura ambiente e a umidade relativa do ar.
O Programa Monitor do Computador
Os dados de temperatura, umidade e capacitância são enviados para o computador através da comunicação serial UART do dsPIC. Um conversor de níveis TTL/RS232 é utilizado para conectar o dsPIC à porta serial do computador (porta COM1).
A comunicação está configurada para 9600 bps 8-N-1.
Com a utilização do Hyperterminal do Windows é possível visualizar o pacote de mensagens enviado do dsPIC para o computador a cada 2 segundos.
Pacote de mensagem serial vista no Hyperterminal do Windows.
O programa dsPIC Temperature and Humidity Monitor é visualizado na Figura abaixo. Ele foi desenvolvido no Visual Basic 6.0.
O programa mostra os valores atuais de temperatura, umidade relativa do ar e capacitância.
Também são mostrados o bargraph das variáveis e um gráfico temporário para temperatura e umidade.
O programa dsPIC Temperature and Humidity Monitor.
A cada 1 minuto os valores de temperatura, umidade relativa do ar e capacitância são gravados em um arquivo TXT de data log.
Arquivo TXT de data log.
O gráfico abaixo mostra o resultado de 30 horas de medição com o protótipo do dsPIC Temperature and Humidity Monitor. Os dados do arquivo de data log foram utilizados para montar o gráfico no Excel.
Os dados coletados estão com a resolução de 1 °C, 1 %RH e 1 pF, ou seja, sem as casas decimais, mas podem ser enviados pelo dsPIC com as casas decimais, bastando implementar o código.
Gráfico da temperatura e umidade coletado com o dsPIC.
Observação: os teste foram feitos durante um dia/noite com o tempo nublado a chuvoso.
O protótipo do circuito do dsPIC Temperature and Humidity Monitor em funcionamento pode ser visualizado no vídeo abaixo.
Referencias:
MICROCHIP. dsPIC30F3014/4013 High-Performance, 16-Bit Digital Signal Controllers. Data sheet.
Prof. Fernando Lang da Silveira. Umidade relativa: o que é e como se determina? UFRGS/ Centro de Referência para o Ensino de Física - CREF/ Instituto de Física- iF.
It's my first project with FreeRTOS and PIC32MX Port.
This program has three tasks that blink three LEDs with different frequencies.
The period of each task is 250 ms, 500 ms and 1000 ms.
The tasks have different priorities.
Real Time Operating System.
FreeRTOS v6.0.4 Kernel.
PIC32MX795F512L MIPS32 M4K Core @80 MHz 32-bit.
Debug the FreeRTOS with RTOS Viewer.
My First Project step-to-step.
The First Task: Blink LED.
Exemplo de como implementar o FreeRTOS v6.0.4, um Sistema Operacional em Tempo Real, com o PIC32.
São criadas 3 tarefas, com 3 prioridades diferentes, que piscam 3 LEDs em frequências distintas.
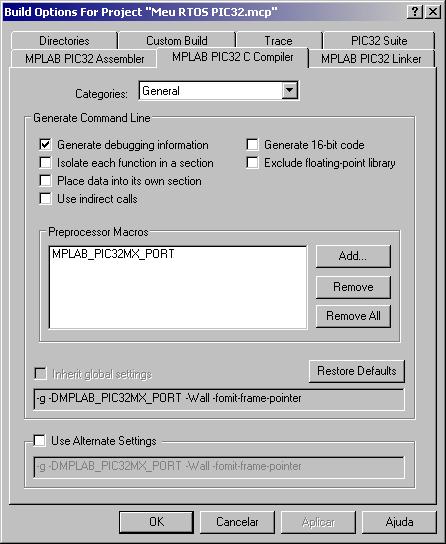
O projeto foi criado no MPLAB IDE v8.83 e compilado com o MPLAB C32 v2.02.
Utiliza o plugin RTOS Viewer no MPLAB para visualizar o estado das tarefas (tasks) e do escalonador (scheduler) do freeRTOS.
Cada
task tem a tarefa de inverter o estado de um LED do PIC32 USB Starter
Kit II e enviar para a saída padrão (SIM UART no MPLAB) uma string com o
período de execução.
/*
FreeRTOS V6.0.4 - Copyright (C) 2010 Real Time Engineers Ltd.
***************************************************************************
* *
* If you are: *
* *
* + New to FreeRTOS, *
* + Wanting to learn FreeRTOS or multitasking in general quickly *
* + Looking for basic training, *
* + Wanting to improve your FreeRTOS skills and productivity *
* *
* then take a look at the FreeRTOS eBook *
* *
* "Using the FreeRTOS Real Time Kernel - a Practical Guide" *
* http://www.FreeRTOS.org/Documentation *
* *
* A pdf reference manual is also available. Both are usually delivered *
* to your inbox within 20 minutes to two hours when purchased between 8am *
* and 8pm GMT (although please allow up to 24 hours in case of *
* exceptional circumstances). Thank you for your support! *
* *
***************************************************************************
This file is part of the FreeRTOS distribution.
FreeRTOS is free software; you can redistribute it and/or modify it under
the terms of the GNU General Public License (version 2) as published by the
Free Software Foundation AND MODIFIED BY the FreeRTOS exception.
***NOTE*** The exception to the GPL is included to allow you to distribute
a combined work that includes FreeRTOS without being obliged to provide the
source code for proprietary components outside of the FreeRTOS kernel.
FreeRTOS is distributed in the hope that it will be useful, but WITHOUT
ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or
FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for
more details. You should have received a copy of the GNU General Public
License and the FreeRTOS license exception along with FreeRTOS; if not it
can be viewed here: http://www.freertos.org/a00114.html and also obtained
by writing to Richard Barry, contact details for whom are available on the
FreeRTOS WEB site.
1 tab == 4 spaces!
http://www.FreeRTOS.org - Documentation, latest information, license and
contact details.
http://www.SafeRTOS.com - A version that is certified for use in safety
critical systems.
http://www.OpenRTOS.com - Commercial support, development, porting,
licensing and training services.
*/
#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H
#include <p32xxxx.h>
/*-----------------------------------------------------------
* Application specific definitions.
*
* These definitions should be adjusted for your particular hardware and
* application requirements.
*
* THESE PARAMETERS ARE DESCRIBED WITHIN THE 'CONFIGURATION' SECTION OF THE
* FreeRTOS API DOCUMENTATION AVAILABLE ON THE FreeRTOS.org WEB SITE.
*
* See http://www.freertos.org/a00110.html.
*----------------------------------------------------------*/
#define configUSE_PREEMPTION 1
#define configUSE_IDLE_HOOK 0
#define configUSE_TICK_HOOK 0
#define configTICK_RATE_HZ ( ( portTickType ) 1000 )
#define configCPU_CLOCK_HZ ( ( unsigned long ) 80000000UL )
#define configPERIPHERAL_CLOCK_HZ ( ( unsigned long ) 40000000UL )
#define configMAX_PRIORITIES ( ( unsigned portBASE_TYPE ) 5 )
#define configMINIMAL_STACK_SIZE ( 190 )
#define configISR_STACK_SIZE ( 400 )
#define configTOTAL_HEAP_SIZE ( ( size_t ) 28000 )
#define configMAX_TASK_NAME_LEN ( 8 )
#define configUSE_TRACE_FACILITY 0
#define configUSE_16_BIT_TICKS 0
#define configIDLE_SHOULD_YIELD 1
#define configUSE_MUTEXES 1
#define configCHECK_FOR_STACK_OVERFLOW 2
#define configQUEUE_REGISTRY_SIZE 0
/* Co-routine definitions. */
#define configUSE_CO_ROUTINES 0
#define configMAX_CO_ROUTINE_PRIORITIES ( 2 )
/* Set the following definitions to 1 to include the API function, or zero
to exclude the API function. */
#define INCLUDE_vTaskPrioritySet 1
#define INCLUDE_uxTaskPriorityGet 1
#define INCLUDE_vTaskDelete 0
#define INCLUDE_vTaskCleanUpResources 0
#define INCLUDE_vTaskSuspend 1
#define INCLUDE_vTaskDelayUntil 1
#define INCLUDE_vTaskDelay 1
#define INCLUDE_uxTaskGetStackHighWaterMark 1
/* The priority at which the tick interrupt runs. This should probably be
kept at 1. */
#define configKERNEL_INTERRUPT_PRIORITY 0x01
/* The maximum interrupt priority from which FreeRTOS.org API functions can
be called. Only API functions that end in ...FromISR() can be used within
interrupts. */
#define configMAX_SYSCALL_INTERRUPT_PRIORITY 0x03
#endif /* FREERTOS_CONFIG_H */
Minimum code to create one task:
// ********* Meu Primeiro Projeto FreeRTOS com PIC32 MX *****************
#include <p32xxxx.h>
/*-------------- Configuração dos Bits Fuses do PIC32 ---------------------*/
#pragma config FPLLODIV=DIV_1, FPLLIDIV=DIV_2, FPLLMUL=MUL_20, FPBDIV=DIV_2
#pragma config FWDTEN=OFF, FCKSM=CSDCMD, POSCMOD=XT, FNOSC=PRIPLL
#pragma config CP=OFF, BWP=OFF
#pragma config FMIIEN = OFF, FETHIO = OFF // external PHY in RMII
#include <plib.h>
#include "FreeRTOS.h"
#include "task.h"
int main( void ){
SYSTEMConfigPerformance( configCPU_CLOCK_HZ - 1 ); //configuração do PIC32
mOSCSetPBDIV( OSC_PB_DIV_2 );
INTEnableSystemMultiVectoredInt();
portDISABLE_INTERRUPTS();
vPortInitialiseBlocks();
xTaskCreate( // cria a task
vTASK0, // ponteiro para a funcao que implementa a task
"Task 0", // texto para a task
250, // espaço para pilha de memoria RAM em Words
NULL, // não utiliza parâmetos
1, // prioridade da task
NULL ); // não usa task handle
vTaskStartScheduler(); //inicia o Scheduler (escalonador) do RTOS
}
/*------------------ funcao executada pela task ------------------------*/
static void vTASK0( void *pvParameters ){
while(1)
{
// minha tarefa aqui!!!
}
}
This is my project of the Tetris Game with PIC32MX and Graphic Display 240x320 QVGA TouchScreen.
Resources:
- standard Tetris pieces: O, I, S, Z, L, J and T;
- standard Tetris board: 20 lines x 10 columns;
- command Pause;
- selection for Initial Level;
- color or monochrome block;
- game record storage in external memory Flash SST25;
- standard Tetris falling iteration delay: 0.5 sec - 0.05 sec;
- standard Tetris score;
- 10 difficulty Levels;
- randomizes pieces with Timer4 (not used random function of the C Language).
This is the video of my project of the Tetris Game with PIC32MX and Graphic Display 240x320 QVGA TouchScreen.
Video - PIC32MX Tetris Game and Graphic Display QVGA TouchScreen.
Alexey Pajitnov created the first electronic version of Tetris in 1985 in Russia!
Special thanks toColin Faheyfor providinginformation,settingsand examples codes ofstandardTetrisgame on virtual gallery - website"The History of Tetris"!






















































{kind=link}